



В данной статье описаны возможности формирования функциональной грамотности школьников на базе естественнонаучного образования на основе предметных, в частности, физических знаний, а также метапредметных и универсальных способов деятельности в технической сфере деятельности. Конечной целью формирования функциональной грамотности в направлении естественнонаучного образования - это овладение на современном уровне пользовательскими навыками управления различными техническими системами, как в быту, так и в производственной деятельности. На современном этапе развития общества такие навыки, как правило, имеют цифровой характер с элементами настройки. С другой стороны, обществу требуются не только пользователи, но и специалисты по обслуживанию современной техники, а также разработчики таких систем. В этом случае, к ключевым компетенциям, формируемым на уроках физики в школе как пропедевтики технической и инженерной подготовки можно отнести компетенции по работе с цифровым физическим оборудованием, на котором выполняются конструкции для проведения физического эксперимента и выполнения технических проектов, в том числе и с элементами цифровой настройки таких исследовательских конструкций, а также элементами программирования.
Для примера рассмотрим ряд таких навыков, которые формируются на занятиях физического практикума 10 класса в МАОУ «СОШ №135» г. Перми с применением наборов по образовательной робототехнике. Все нижеизложенные примеры реализованы на базе наборов Lego Mindstorms, хотя это не является обязательным, и подобные работы могут быть выполнены на базе других конструкторов.
Построение и анализ графика зависимости физической величины от времени
Умение работы с графиками, их построение и интерпретация является неотъемлемой и очень важной частью современного уровня образования. В нашем случае школьники используют инструмент по построению графика, входящего в состав программного обеспечения Lego Mindstorms, в котором реализуется построение графика зависимости физической величины, определяемой датчиком от времени. Поскольку с системой Lego Mindstorms на сегодняшний день совместимы десятки датчиков различных производителей, в том числе и отечественных, мы имеем большой выбор таких исследований, начиная с использования датчиков, входящих в базовый набор. Рассмотрим пример построения графика колебаний с использованием датчика цвета (или датчика освещённости в более ранней версии конструктора). На рисунке 1 представлен нитяной маятник в конструкции которого имеется датчик цвета, установленный рядом с плоскостью колебания маятника (датчик может быть закреплён и под шариком). При совершении колебаний шарик, проходя около датчика, отражает подсветку датчика или закрывает часть светового потока падающего на датчик, тем самым меняя значения освещённости датчика. На графике отображается значение освещённости с течением времени. При настройке (программировании) этого задания школьнику необходимо указать в основном окне программирования несколько параметров: вид датчика, частота снятия показаний, режим работы датчика (в освещённом или проходящем свете) и длительности эксперимента.
Рис 1. Установка для построения графика колебаний

По данному графику школьник может выполнить ряд предметных заданий: определить период и частоту колебаний, исследовать зависимость периода колебаний от длины нити, проверить формулу зависимости периода колебаний от длины нити и другие задания. На базе этой конструкции могут быть выполнены проекты с более сложным вариантом конструкции: получение незатухающих колебаний, программно изменяемая длина нити с помощью электромотора, определение амплитуды колебаний с использованием датчика расстояния и др.
Автоматизированное измерение времени
Измерение времени в физических исследованиях является достаточно распространённой процедурой. Рассмотрим пример автоматизированного измерения времени движения шарика по наклонной плоскости для дальнейшего определения ускорения шарика и вычисления конечной скорости движения. Стандартная лабораторная работа по физике по определению ускорения предполагает самостоятельное измерение школьниками длины наклонной плоскости и времени движения, с дальнейшей подстановкой в формулу ускорения. На современном этапе для школы выпускаются варианты такой лабораторной работы с использованием датчиков и цифровых секундомеров, но этот вариант оборудования не является универсальным и имеет сложности для применения в других ситуациях. К тому же цифровой сигнал секундомера выводится только на табло и не может быть использован для других действий. В случае самостоятельного программирования установки на базе наборов по робототехнике значение времени может быть записано в переменную и кроме вывода на экран может быть использовано для программного вычисления ускорения и скорости, а также может быть использовано для сравнения с результатами подобных измерений при других начальных условиях.
Общий алгоритм программы для измерения времени достаточно простой и предполагает запуск программного таймера по одному событию и остановку таймера по второму событию. После остановки таймера происходит сохранение значения времени в переменную. На рисунке 2а и 2б представлены конструкции для выполнения лабораторного исследования по определению ускорения и конечной скорости шарика их деталей стандартных наборов Lego Mindstorms EV3 и Lego Mindstorms NXT.
Рис. 2а. Конструкция на базе Lego Mindstorms EV3
.jpg "Рис. 2б. Конструкция на базе Lego Mindstorms NXT")
Рис. 2б. Конструкция на базе Lego Mindstorms NXT
.png "Рис. 2а. Конструкция на базе Lego Mindstorms EV3")
В обеих конструкциях движение шарика ограничивает удерживающее устройство, собранное с использованием мотора. Событием, запускающим таймер в обеих конструкциях, является срабатывание удерживающего устройства (мотора), после чего шарик начинает скатываться. А событием, останавливающем таймер, является срабатывание датчика, находящегося в нижней части наклонной плоскости. Также в обеих конструкциях установлен датчик расстояния для автоматического определения длины наклонной плоскости. Значение длины также записывается в свою переменную и может быть выведено на экран микропроцессорного блока или так же может быть использовано для программного вычисления ускорения и конечной скорости с дальнейшим выводом на экран результатов этих вычислений.
Пространственное сканирование величины
Данный метод применяется в технике для того, чтобы вести мониторинг некоторой величины, найти наибольшее или наименьшее значение величины в определённом месте пространства и другие задачи. Сканирование может быть линейным, когда идёт поиск вдоль выбранной линии, сканирование двумерное, по поверхности и трёхмерное, в пространстве. Во время сканирования с датчика некоторой физической величины последовательно записываются значения датчика и координаты данного значения. Нужное значение может быть выбрано из записанного массива данных путём сравнения. Рассмотрим два примера проектов сканирования величин.
Нахождение направления на солнце с помощью датчика освещённости. Такая задача, в частности, решается при ориентации панели солнечных батарей на солнце. На рисунке 3а показан вариант такой установки, в котором узкий световой пучок формируется узкой трубкой, в нижней части которой расположен датчик освещённости (рис 3б). Наклон трубки меняется с помощью мотора. Сканирование начинается с горизонтального положения трубки. Далее трубка поднимается, например, на 10 градусов и показание датчика записывается в переменную.
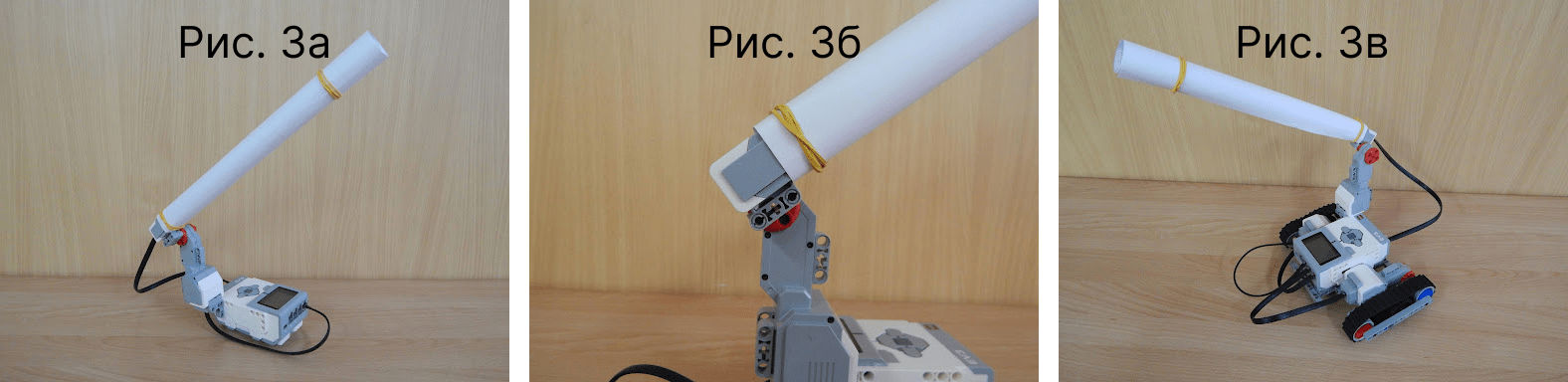
При следующем положении трубки после поворота ещё на 10 градусов, показание датчика сравнивается с предыдущим. Если показание освещённости стало больше, то это показание сохраняется для последующих сравнений, а также сохраняется значение угла, при котором на данный момент времени получено максимальное значение освещённости. Далее такие повороты на 10 градусов продолжаются до 180 градусов. После поворота трубки на 180 градусов за 18 шагов программа автоматически устанавливает трубку в то положение, которое соответствует максимальной освещённости. При этом значение угла с максимальной освещённостью может быть выведено на экран микропроцессорного блока. В данной конструкции решена поставленная задача в одномерном варианте. В случае необходимости конструкцию можно усложнить, например, установить этот сканер на любую подвижную конструкцию, которая может делать поворот в горизонтальной плоскости (рис 3в), или установить на горизонтальную платформу, которая тоже в свою очередь будет уже в горизонтальной плоскости поворачиваться на 10 градусов. В этом случае количество измерений увеличится в 18 раз. То есть робот будет проводить сканирование в вертикальной плоскости не один раз, а 18 раз при новых положениях горизонтальной платформы, угол поворота которой тоже будет сохраняться, если при данном угле показания датчика будут превышать предыдущие показания. Таким образом, можно просканировать небо по всей полусфере. В помещении солнце можно заменить на любой источник света, а угол поворота при одном шаге может быть изменён на любой другой, в зависимости от желаемой точности определения направления.
Определение местонахождения магнита, расположенного под поверхностью стола с помощью подвижного робота, оснащённого датчиком магнитного поля. Алгоритм робота предполагает многократное движение робота вдоль одной из сторон стола, смещая каждый проход от края стола, пока не будет пройдена вся поверхность. В положение робота описывается двумя координатами, одна из которых изменяется вдоль одной из сторон столешницы, а вторая в перпендикулярном направлении. Через определённые пройденные расстояния или промежутки времени происходит запись координаты и соответствующей этой точке пространства значение измеряемой величины. В отличие от предыдущего примера здесь можно, например, вести запись всех измерений в двумерный массив данных, а после сканирования поверхности произвести анализ результатов полученной таблицы. В этом случае программирование этой задачи имеет более сложный уровень.
Автоматический контроль величины
Примером такой задачи является поддержание заданной температуры системой климат-контроля автомобиля, теплицы, дома, сауны, холодильника и других систем. В качестве школьного проекта контроля температуры можно рассмотреть небольшую конструкцию, содержащую емкость с водой, температура в которой повышается нагревателем (электрическая плитка или кипятильник). В свою очередь нагреватель должен быть подключен, например, через реле к управляющему блоку и включаться и выключаться в зависимости от показаний датчика, установленного в ёмкости. При достижении нижнего порога допустимой температуры нагреватель включается, а при достижении верхнего порога выключается. Остывание системы происходит за счёт теплоотдачи в окружающее пространство. Разница между нижним и верхним порогом температуры может составлять десятые доли градуса. Колебания температуры воздуха в таких пределах человеком не ощущаются и воспринимаются как один и тот же уровень температуры. Аналогично можно выполнить проект с воздухом в закрытом сосуде, который можно подогревать, например, феном. На рисунке 4а представлена модель терморегуляции ядерного реактора, в котором нагрев имитируется электрическим нагревателем.
Рис. 4а
.png)
Рис. 4б
.jpg)
В этой модели кроме поддержания температуры имитируется движение управляющих стержней, которые в реакторе замедляют ход ядерной реакции. Также на теплообмен в данной модели реактора влияет жидкость (вода), циркулирующая между «активной» зоной реактора и теплообменником, в котором тепло переходит воде второго контура (резервуар с водой), имеющую более холодную температуру. На рисунке 4б показана часть проекта атомной электростанции, в которой модель атомного реактора представлена как его основная часть.
Приведённые выше примеры формирования компетенций в области конструирования, программирования и исследования являются наиболее универсальными в различных исследованиях и проектах по физике и могут быть распространены на большое количество других исследовательских конструкций различной сложности.


